Geometric Theory
Many modeling programs do not strictly enforce geometric theory; for example, it is possible for two vertices to have two distinct edges connecting them, occupying exactly the same spatial location. It is also possible for two vertices to exist at the same spatial coordinates, or two faces to exist at the same location. Situations such as these are usually not desired and many packages support an auto-cleanup function. If auto-cleanup is not present, however, they must be deleted manually.
http://en.wikipedia.org/wiki/Polygonal_modelingMany modeling programs do not strictly enforce geometric theory; for example, it is possible for two vertices to have two distinct edges connecting them, occupying exactly the same spatial location. It is also possible for two vertices to exist at the same spatial coordinates, or two faces to exist at the same location. Situations such as these are usually not desired and many packages support an auto-cleanup function. If auto-cleanup is not present, however, they must be deleted manually.
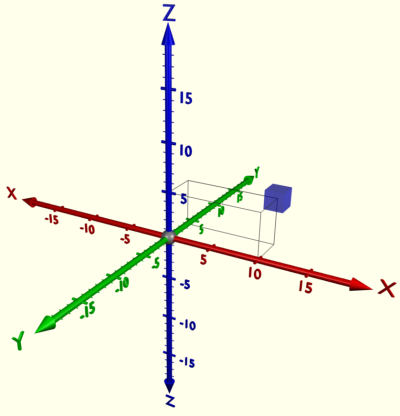
Cartesian Coordinates System

http://blog.hasslberger.com/img/cartesian.png
{kind=link}
The 3D co-ordinates are pretty much the same as 2D co-ordinates except there’s a third axis known as the Z or ‘depth’ axis. 3D programs operate on a grid of 3D co-ordinates.
Geometric Theory and Polygons
The basic object used in mesh modeling is a vertex, a point in three dimensional space. Two vertices connected by a straight line become an edge. Three vertices, connected to each other by three edges, define a triangle, which is the simplest polygon in Euclidean space. More complex polygons can be created out of multiple triangles, or as a single object with more than 3 vertices. Four sided polygons (generally referred to as quads) and triangles are the most common shapes used in polygonal modeling. A group of polygons, connected to each other by shared vertices, is generally referred to as an element. Each of the polygons making up an element is called a face.
In Euclidean geometry, any three non-collinear points determine a plane. For this reason, triangles always inhabit a single plane. This is not necessarily true of more complex polygons, however. The flat nature of triangles makes it simple to determine their surface normal, a three-dimensional vector perpendicular to the triangle's surface. Surface normals are useful for determining light transport in ray tracing, and are a key component of the popular Phong shading model. Some rendering systems use vertex normals instead of face normals to create a better-looking lighting system at the cost of more processing. Note that every triangle has two face normals, which are on the same line but opposite from each other. In many systems only one of these normals is considered valid – the other side of the polygon is referred to as a backface, and can be made visible or invisible depending on the programmer’s desires.
A group of polygons which are connected by shared vertices is referred to as a mesh. In order for a mesh to appear attractive when rendered, it is desirable that it be non-self-intersecting, meaning that no edge passes through a polygon. Another way of looking at this is that the mesh cannot pierce itself. It is also desirable that the mesh not contain any errors such as doubled vertices, edges, or faces. For some purposes it is important that the mesh be a manifold – that is, that it does not contain holes or singularities (locations where two distinct sections of the mesh are connected by a single vertex).

{kind=link}
Another common method of creating a polygonal mesh is by connecting together various primitives, which are predefined polygonal meshes created by the modeling environment. Common primitives include:
- Cubes
- Pyramids
- Cylinders
- 2D primitives, such as squares, triangles, and disks
- Specialized or esoteric primitives, such as the Utah Teapot or Suzanne, Blender's monkey mascot.
- Spheres - Spheres are commonly represented in one of two ways:
- Icospheres are icosahedrons which possess a sufficient number of triangles to resemble a sphere.
- UV Spheres are composed of quads, and resemble the grid seen on some globes - quads are larger near the "equator" of the sphere and smaller near the "poles," eventually terminating in a single vertex.

{kind=link}
Surfaces
In mathematics, specifically, in topology, a surface is a two-dimensional, topological manifold. The most familiar examples are those that arise as the boundaries of solid objects in ordinary three-dimensional Euclidean space - for example, the surface of a ball. On the other hand, there are surfaces, such as the Klein bottle, that cannot be embedded in three-dimensional Euclidean space without introducing singularities or self-intersections.To say that a surface is "two-dimensional" means that, about each point, there is a coordinate patch on which a two-dimensional coordinate system is defined. For example, the surface of the Earth is a two-dimensional sphere, and latitude and longitude provide two-dimensional coordinates on it.
The concept of surface finds application in physics, engineering, computer graphics, and many other disciplines, primarily in representing the surfaces of physical objects. For example, in analyzing the aerodynamic properties of an airplane, the central consideration is the flow of air along its surface.

http://en.wikipedia.org/wiki/Surface
No comments:
Post a Comment